ИСПОЛЬЗОВАНИЕ ДВУНАПРАВЛЕННОЙ СИСТЕМЫ ОБУЧЕНИЯ ПРИ РЕАЛИЗАЦИИ НЕЙРОУПРАВЛЕНИЯ ШАГАЮЩИМ АППАРАТОМ
Автор: Валерий Константинович Зимичев
Соавторы: Кобрин А.И.,д.ф.-м.н.,проф
Организация: НИУ МЭИ
Собран и испытывается двуногий шагающий аппарат – робот, управляемый сервоприводами с нейросетевым регулятором [1]. Рассматривается движение системы по горизонтальной плоскости. Обратная связь обеспечивается при помощи гироскопа и акселерометра. Нейронная сеть производит решение и позволяет оптимизировать прямую и обратную задачи управления.
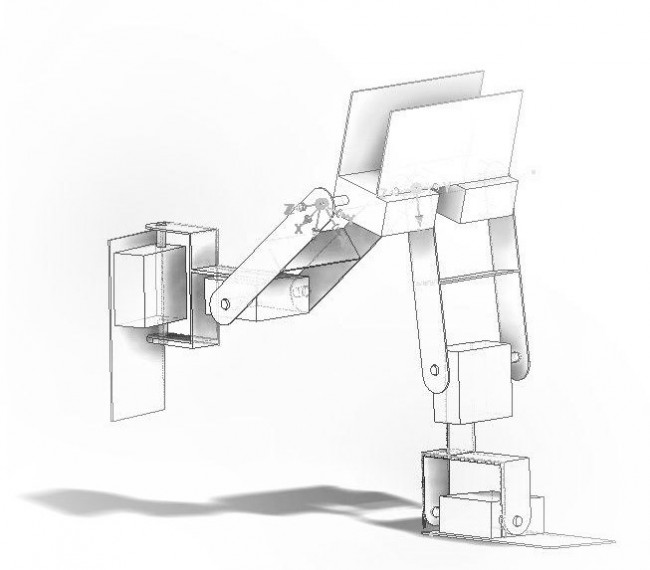
Механическая система двуногого шагающего аппарата состоит из 6 суставов: бедренных, коленных и суставов ступней, и, таким образом, имеет 6 степеней свободы. Схема конструкции ног аппарата представлена на рисунке. Система полностью автономна, все программные вычисления и питание являются носимыми.
Вычислительная часть управления делится на высокоуровневую и низкоуровневую. Низкий уровень обеспечен управляющей платой Arduino Uno. К ней непосредственно подсоединены исполняющие сервоприводы, а также датчики - акселерометр ADXL345 и микромеханический гироскоп BMI160. Плата обеспечивает сбор и передачу данных на высокий уровень. Также на роботе имеется носимый портативный одноплатный компьютер Raspberry Pi3. На нём, средствами языка Python реализован алгоритм самообучения.
Алгоритм, исполняя заданную или сгенерированную предыдущим запуском последовательность действий сервоприводов, записывает обучающий образец реальных показаний датчиков. Параллельно, алгоритм обучения запускает прямое прохождение нейронной сети, а затем реализацию метода обратного распространения ошибки, основанный на сравнении полученных данных и предсказаний нейронной сети. Используются метод градиентного спуска и несколько видов регуляризации весов. Авторами разрабатывается применение нового вида регуляризации использующего немарковское затухание.
Обучение проходит в направлениях решения прямой и обратной задачи механики. Нейронная сеть, методами автоматической оптимизации, связывает исполняемую последовательность действий и последствия её исполнения. Таким образом, решение прямой задачи определяет программу действий, а решение обратной задачи даёт алгоритм, ведущий к желаемым результатам.
В работе разрабатывается архитектура управления нейронной сетью, позволяющая применить двунаправленный обучающий алгоритм настройки параметров нейронов во время ходьбы в режиме реального времени. Преимуществами создаваемой системы управления являются, адаптивность к переменным параметрам подстилающей поверхности и кросс-платформенность.
Литература
1. В.К.Зимичев, А.И. Кобрин, Нейроуправление адаптируемой динамикой шагающего робота // РАДИОЭЛЕКТРОНИКА, ЭЛЕКТРОТЕХНИКА И ЭНЕРГЕТИКА: Двадцать шестая Междунар. науч.-техн. конф. студентов и аспирантов (12–13 марта 2020 г., Москва): Тез. докл. — М.: ООО «Центр полиграфических услуг „Радуга“», 2020. — С.997.
