ДИНАМИКА ДВИЖЕНИЯ ДВУХОПОРНОГО МОБИЛЬНОГО РОБОТА С ПОДВИЖНОЙ МАССОЙ
Автор: Денис Владимирович Бордюгов
Соавторы: Брискин Е.С., Шаронов Н.Г.
Организация: Волгоградский государственный технический университет
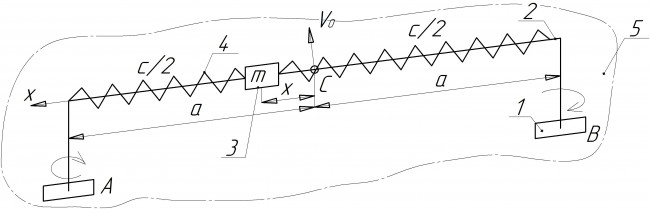
Рассматривается перемещение двухопорного робота, осуществляемое следующим образом: одна из опор 1 взаимодействует с поверхностью 5 и неподвижна, условием неподвижности является смещение груза 2 [1], массой m, взаимодействующего с упругим элементом 4, относительно середины стержня АВ (3) к одной из опор, в этот момент происходит ее фиксация, в то время как другая находится в фазе переноса, позволяя стержню поворачиваться вокруг неподвижной опоры. Затем происходит их смена, и робот изменяет направление вращения. В начальный момент времени задается скорость V0. Процесс движения подобен движению «Кельтского камня» [2].
1. Черноусько Ф.Л. О движении тела, содержащего подвижную внутреннюю массу//Докл. Академии Наук. 2005. Т. 405, № 1. С. 56-60.
2. Журавлёв В.Ф., Климов Д.М. Глобальное движение кельтского камня // Известия Российской академии наук. Механика твердого тела. 2008. №3. С. 8-16.
