МОДЕЛИ КОНТАКТНОГО ВЗАИМОДЕЙСТВИЯ МЕДИЦИЦИНСКИХ ИНСТРУМЕНТОВ С МЯГКИМИ БИОЛОГИЧЕСКИМИ ТКАНЯМИ
Автор: Ирина Георгиевна Горячева
Организация: Институт механики МГУ, Москва
Модели механики контактных взаимодействий находят широкое применение при анализе взаимодействия медицинских инструментов с различными биологическими тканями, а также при разработке методов оценки механических характеристик сложных биологических объектов. Полученные знания имеют самостоятельный интерес, а также используются для разработки сложных робототехнических устройств для проведения различного рода малоинвазивных операций, в том числе с возможностью тактильного очувствления действий хирурга во время операций на различных органах.
Излагаются методы решения контактных задач о взаимодействии медицинского инструмента с мягкой упругой тканью, основанные на подходах механики дискретного контакта [1]. Анализируется влияние формы поверхности инструмента на распределение контактных давлений и на зависимость внедрения инструмента от приложенной к нему силы [2]. Ставятся вопросы выбора формы поверхности инструмента, обеспечивающей более равномерное распределение действующей нагрузки по поверхности инструмента.
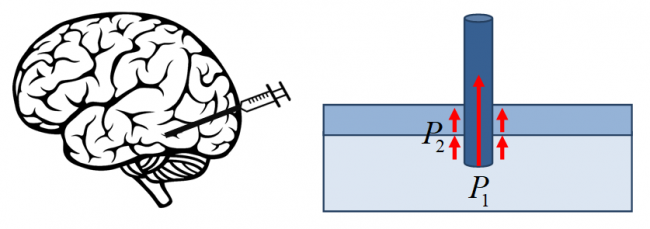
При разработке позиционирующего медицинского оборудования возникает необходимость описания процесса взаимодействия иглы с биологической тканью (рис.1а) или фантомом, моделирующим механическое поведение мягких тканей. Процесс взаимодействие иглы с мягкими тканями включает в себя несколько стадий: сжатие мягкой ткани, прокол, углубление иглы в ткань на большую глубину, удержание ее на этой глубине и дальнейшее ее извлечение. При этом необходимо учитывать такие механические процессы, происходящие в ткани, как упругое сжатие, разрушение поверхностного слоя, большие деформации, релаксация напряжений, трение (рис.2б). Для описания механического поведения биологической ткани применяются упруго-вязко-пластические модели. Использование аналитических методов позволяет получить зависимости силы от времени (или глубины внедрения) в течение всего процесса взаимодействия.
Важным применением методов механики в медицине является также разработка приборов для определения механических свойств биологических тканей [3].
1. Горячева И.Г. Механика фрикционного взаимодействия. М.: Наука. 2001. 478 с.
2. Яковенко А.А. Моделирование контактного взаимодействия захватывающего инструмента с биологической тканью. Российский журнал биомеханики. 2017, т.21, № 4, сс.418-428.
3.M.M. Gubenko, A.V. Morozov, A.N. Lyubicheva, I.G. Goryacheva, M.Z. Dosaev, M.-Sh. Ju, Ch.-S. Yeh, F.-Ch. Su. Video-tactile pneumatic sensor for soft tissue elastic modulus estimation. BioMedical Engineering. 2017, V.16, № 94
