")
")
СИСТЕМА УПРАВЛЕНИЯ МАНИПУЛЯТОРА МАНГО
Автор: Алексей Валерьевич Подопросветов
Соавторы: В.Е. Павловский
Организация: ФИЦ ИПМ им.М.В.Келдыша РАН
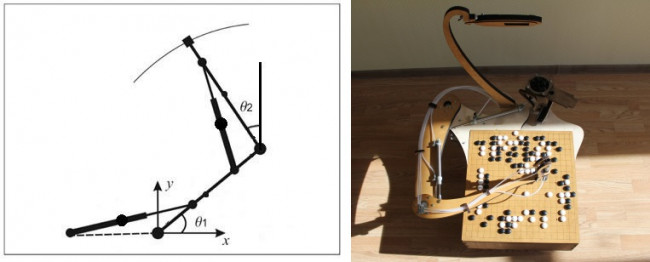
Основные типы приводов для современных робототехнических устройств технологически производятся с известными либо хорошо прогнозируемыми характеристиками. Знание этих характеристик позволяет разработчикам, пользуясь теорией автоматического регулирования, рассчитывать согласованные параметры управления и программы формирования движений. Однако такие методы плохо адаптируются для работы с пневматическими приводами, которые обладают значительными и плохо прогнозируемые упругостями, вызванными сжимаемостью воздуха в полостях пневмоцилиндров. Математическая модель, описывающая динамику пневматического привода, сложна для анализа. Эти обстоятельства затрудняют синтез управления традиционными средствами. Для построения системы управления манипулятора с пневматическими приводами используется нейронная система управления с обучением. В качестве простой экспериментальной модели с трудно формализуемыми свойствами, позволяющей в наглядной форме реализовать управление на основе нейронной сети, выбран двухзвенный манипулятор, кинематическая схема которого представлена на Рис. 1. Крепления звеньев и пневмоцилиндров представляют собой цилиндрические шарниры с одной степенью свободы. Положение системы определяется углами θ1 и θ2, представленными на схеме. В работе реализуется динамическая модель манипулятора с пневматическим приводом и строится система квазистатического позиционного управления, основанная на нейросетях.
Система управления представляет полносвязную нейронную сеть из 4-ех слоев. Входной слой нейросети получает начальные и целевые положения звеньев, в которые должна перейти система. На выходе нейронная сеть выдает вектор времен открытия клапанов пневматических цилиндров, которые переводят манипулятор из начального положения в целевое.
Для данной модели в среде Wolfram Mathematica построена и обучена нейронная система управления, которая позиционирует манипулятор с точностью менее 1 мм. Проведен сравнительный анализ с управлением, основанным на нейроподобном обучении, построенном в статье [2] для этого же манипулятора. В дальнейшем планируется реализовать данные алгоритмы на лабораторном прототипе робота и провести натурные испытание.
Данная работа выполнена при финансовой поддержке РФФИ, проект № 18-08-01441 А.
1. Neural network-based adaptive tracking control of mobile robots in the presence of wheel slip and external disturbance force, Ngoc-Bach Hoang, Hee-Jun Kang, Neurocomputing, 2016, 0925-2312
2. Квазистатическая модель манипулятора манго с нейроподобным управлением. В.Е.Павловский, А.В.Подопросветов, В.С.Смолин. Тр. XIX Международной научно-технической конференции ”Нейроинформатика-2017 Россия, Москва, 2-6 октября 2017. Ч.1, М.: НИЯУ МИФИ, (2017) с.50-59.
