УПРАВЛЕНИЕ ДВИЖЕНИЕМ МОБИЛЬНОГО РОБОТА С ВИБРАЦИОННЫМИ ДВИЖИТЕЛЯМИ
Автор: Денис Владимирович Бордюгов
Соавторы: Брискин Е.С.
Организация: Волгоградский государственный технический университет
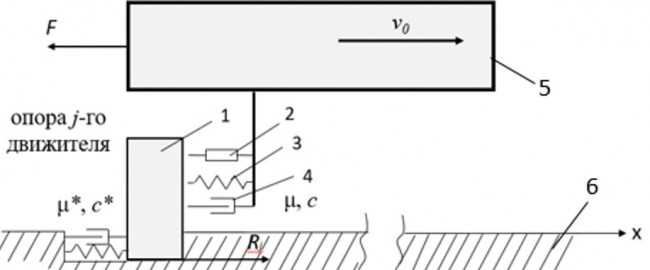
Исследуются способы управления движением мобильного робота с виброприводом, оказывающим периодическое силовое воздействие на движители, которые, в свою очередь, взаимодействуют с грунтом, моделируемым упруговязкой средой [1].
Управляемыми параметрами могут являться частота колебаний движителей, амплитуда колебаний движителей, амплитудное значение вынуждающей силы и скорость робота, которые являются показателями качества движения.
