")
")
Исследование режимов работы приводов дискретно взаимодействующих с поверхностью движителей мобильных роботов
Автор: Николай Геннадьевич Шаронов
Организация: Волгоградский государственный технический унивеситет
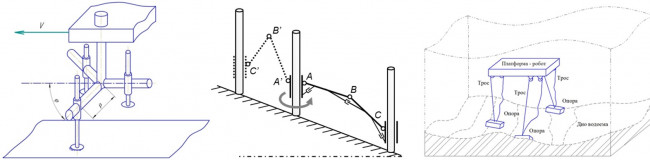
Рассматриваются мобильные роботы с несколькими однотипными произвольно расположенными [1] движителями, дискретно взаимодействующими с опорной поверхностью: роторно-ортогональный [2], заклинивающе-поворотный [3], якорно-тросовый [4] движители. Для каждого из них определены возможные области применения, поставлены некоторые задачи управления движением, приведены полученные результаты исследований.
Особенность роторно-ортогонального движителя состоит в том, что основным приводом курсового движения является привод, совершающий в маршевом режиме вращательное движение [2]. Роторно-ортогональный движитель является развитием ортогонально-поворотного движителя шагающей машины «Ортоног» [5].
Робот c поворотно-заклинивающим движителем может перемещаться по вертикальному или наклонному столбу за счет периодического заклинивания одной из втулок и скольжении другой. Если с одной из втулок связать стержень с управляемой длиной и возможностью его поворота вокруг своей оси, то реализуется возможность и вращательного движения в пространстве [3].
Для перемещения груза в плотных средах рассматривается использование якорно-тросовых движителей, взаимодействующих с неподвижным грунтом посредством «якорей», положение которых изменяется дискретно за счет их управляемого переноса в новое положение. Применение такого типа движителей [4] позволяет осуществлять непрерывное перемещение под водой платформы с положительной плавучестью.
Исследование выполнено при финансовой поддержке РФФИ (проект № 17-01-00675 а).
1.Управление движением группы шагающих машин при перемещении моногруза / Е.С. Брискин, Н.Г. Шаронов // Искусственный интеллект. - 2007. - №4. - 408-415.
2.Development of Rotary Type Movers Discretely Interacting with Supporting Surface and Problems of Control Their Movement / Е.С. Брискин, А.В. Малолетов, Н.Г. Шаронов, С.С. Фоменко, Я.В. Калинин, А.В. Леонард // ROMANSY 21: Springer, 2016. – P. 351-359.
3.Об энергетически эффективных режимах движения роботов с поворотно-заклинивающими движителями / Брискин Е.С., Шаронов Н.Г., Барсов В.С. // Мехатроника, автоматизация, управление. Москва, 2018.
4.Об особенностях управления движением мобильных роботов с движителями якорно-тросового типа / Брискин Е.С., Серов В.А., Шаронов Н.Г., Пеньшин И.С. // Экстремальная робототехника. - 2017. - № 1. - С. 336-343.
5.Об управлении движением шагающей машины со сдвоенными ортогонально-поворотными движителями / Е.С. Брискин, И.П. Вершинина, А.В. Малолетов, Н.Г. Шаронов // Известия РАН. Теория и системы управления. - 2014. - № 3. - C. 168-176
