")
")
Компьютерное моделирование вращения гибкого ротора с системой управления электромагнитными подшипниками
Автор: Константин Александрович Лонин
Соавторы: С.А. Малкин, В.А. Панов, В.Л. Патрушев, Д.В. Савчук, С.А. Соловьев
Организация: АО «ОКБМ Африкантов»
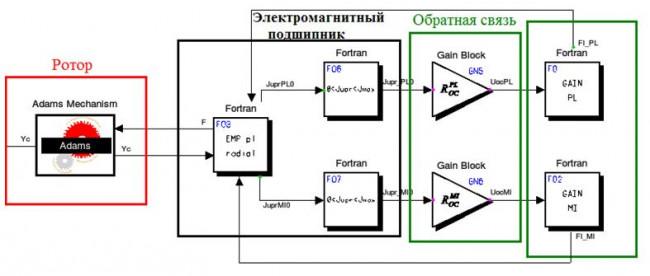
Одной из задач проектирования роторной системы на электромагнитном подвесе является определение и минимизация нагрузок, приходящих на опоры, определение прогибов и напряженного состояния её элементов. Особенности конструкции роторной системы приводят к необходимости разработки алгоритма связного решения задач управления движением и динамики ротора (см. рисунок). Приемлемых результатов моделирования в данном случае можно достичь с использованием комплекса современных программных средств и экспериментальных данных.
В докладе представлено использование технологии компьютерного моделирования вращения гибкого ротора с учетом системы управления электромагнитными подшипниками. При компьютерном моделировании роторной системы учтены особенности взаимодействия гибкого ротора с электромагнитными подшипниками и нагрузки, влияющие на его динамику. Рассмотрено возможное взаимодействие ротора со страховочными подшипниками в случае сейсмического воздействия. При этом определены параметры и особенности взаимодействия ротора со страховочными подшипниками.
1. Белов С.Е., Кодочигов Н.Г., Патрушев В.Л., Руин А.А., Соловьев С.А. Аналитические исследования динамики вращения ротора при отказе резервных подшипников // Вестник Нижегородского университета им. Н.И. Лобачевского.–2011.–№4.–С.63-64.
2. S. Malkin, D. Balandin. On stability of the electromagnetic suspension rotor in space of control parameters // Cybernetics and Physics. –2017.–Vol. 6, NO. 4.–P.147-151.
