")
")
ПРОБЛЕМЫ МЕХАНИКИ ДВИЖЕНИЯ ШАГАЮЩИХ РОБОТОВ
Автор: Ярослав Владимирович Калинин
Соавторы: Мирошкина М.В., Тарасова И.А.
Организация: Волгоградский государственный технический университет
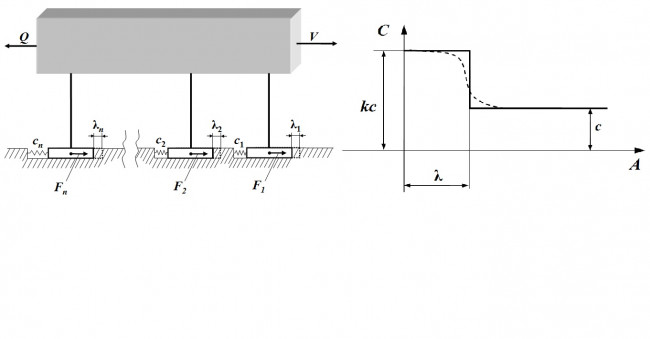
Исследования по механике движения шагающих машин и роботов выявили недостатки, вызванные низкой энергетической эффективностью и сложностью алгоритмов управления их движением. Обусловливается это нелинейностью механических процессов, протекающих при дискретном взаимодействии шагающего движителя с опорной поверхностью, процессами переноса движителей в новое положение относительно корпуса и т.д.
Проявление нелинейных эффектов вызывает необходимость генерирования в приводе курсового перемещения переменных во времени сил для обеспечения равномерного движения, что приводит к непроизводительным потерям энергии.
Одним из возможных вариантов снижения сил в приводе курсового перемещения может быть управление касательной жёсткостью в системе стопа-грунт за счёт переменной жёсткости этой системы.
