")
")
Подводный капсульный робот, управляемый движением одного маховика
Автор: Сергей Александрович Голованов
Организация: Кафедра теоретической механики и мехатроники, механико-математический факультет МГУ
Введение: Исследование капсульных водных роботов - одна из актуальных проблем современной науки. Такие роботы могут применяться даже в медицинских целях. Подробный обзор исследований жидких капсульных роботов можно найти в [1]. Среди классических результатов в этой области можно отметить такие работы, как [2-3].
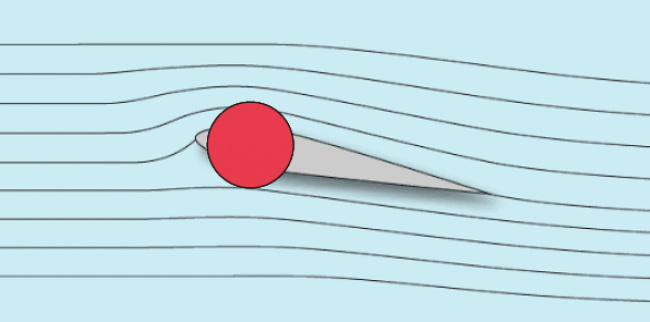
Описание системы: Исследуется подводный капсульный робот с одиночным внутренним маховиком. Робот совершает плоскопараллельное движение. Таким образом, система имеет четыре степени свободы и один управляющий вход. Математическая модель построена в виде динамической системы 5-го порядка. Для этого применяется квазистатическая модель взаимодействия с жидкостью. Эта модель позволяет не только проводить эффективный параметрический анализ, но и выявлять особенности движения, связанные с наличием боковой составляющей гидродинамической силы. Построена стратегия управления.
Результаты: Показано, что боковая сила обеспечивает возможность необратимого движения центра масс в желаемом направлении. Таким образом, перспективно создание подводных капсульных роботов и алгоритмов управления ими на основе использования боковой силы. Результаты моделирования подтверждены экспериментами с прототипом капсульного робота. Подтверждено качественное соответствие модели и экспериментов.
Ключевые слова: подводный робот, движение внутренней массы, квазистатическая модель,
[1] KILIN A, KLENOV A, TENENEV V: Controlling the movement of the body using internal masses in a viscous liquid. Computer research and modeling 2018, 10(4):445-460.
[2] KOZLOV V, RAMODANOV S: The Motion of a Variable Body in an Ideal Fluid. Prikl. Mat. Mekh. 2001, 65(4):592–601 (in Russian).
[3] CHERNOUS'KO F: The optimal periodic motions of a two-mass system in a resistant medium. J. of Applied Mathematics and Mechanics 2008, 72(2):116-125.
